The competition
The UTS Rover Team is a student-led group that competes yearly in the Australian Rover Challenge in Adelaide. The competition runs across four days and is designed to simulate a range of tasks a rover would need to complete on a lunar mission: fine motor interaction, water extraction and prospecting, excavation and construction of lunar regolith, and autonomous path planning and navigation.


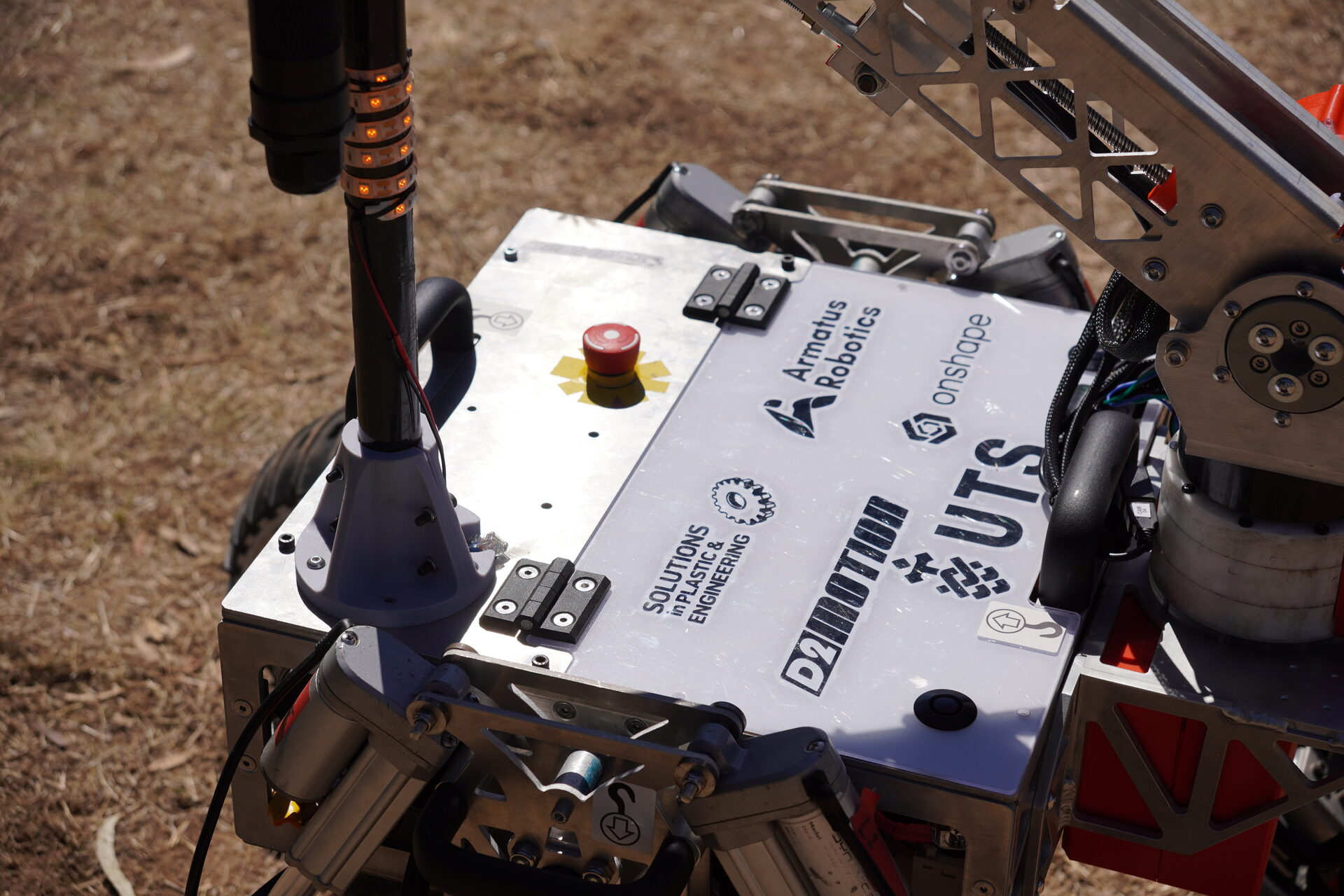
UTS Rover at the Australian Rover Challenge, Adelaide 2026
Joining the team
I joined the rover team in 2025, where I designed the accumulator (battery box and associated power electronics), assisted assembling the electronics, and designed support components including camera mounts and antenna mounts. My passion for robotics and competition was clear to the team lead at the time, who offered me the opportunity to lead the team.
Accumulator and Rover in 2025
Leading the team
Over the following year I led and managed a team of 30+ students to carefully refine and improve the rover, rebuilding the science unit, manipulator, excavation and construction unit, suspension geometry and design, wheels, electronics layout, and basestation, among many other refinements. The key focus was improving competition reliability and maintainability, with all development decisions prioritised based on competition point return. Design for Manufacturing and Design for Assembly was rigorously taught and enforced to ensure the competition readiness of the 2026 rover.
On top of the technical and team management responsibilities, I managed faculty relationships, secured funding, handled safety documentation, reported to faculty and deans, led procurement, planned and booked team travel, and led sponsorship outreach including appearances at the International Astronautical Congress and SXSW.


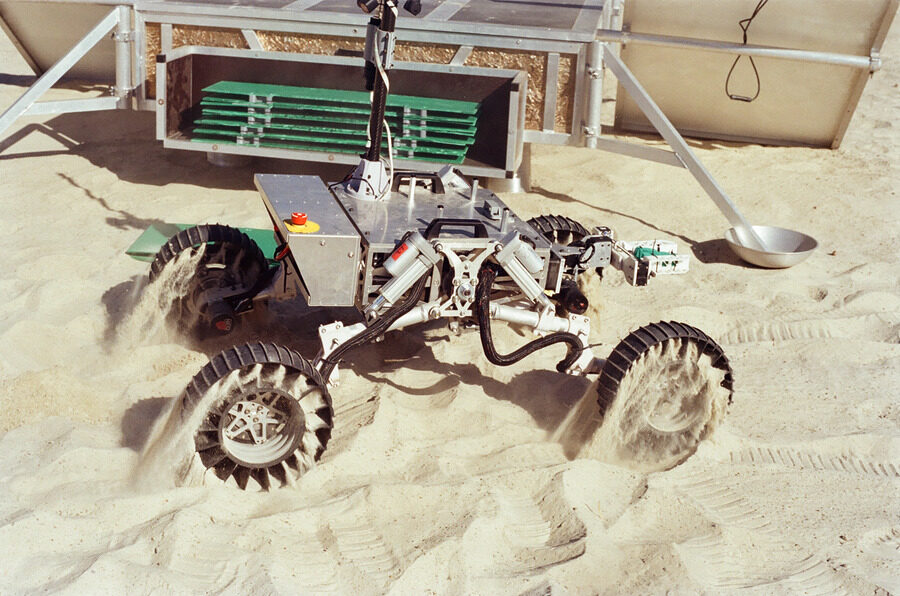
Field testing and workshop, 2026
Funding and results
With no internal funding available during 2025, I pushed the team to run 7 projects in conjunction with UTS subjects, unlocking $2.6k of funding. Through the efforts of our project and outreach manager, we acquired a further $7k of external sponsorship. Despite continued efforts from the team and me, internal funding was not secured until roughly 45 days before competition. Contingency planning allowed us to descope and continue development through these financial setbacks.
At the 2026 competition, despite significant unforeseen issues with our communication systems, we performed excellently, winning the Exterres Crater Lab Challenge, which qualified us for the NASA-run Lunabotics competition in the US, and winning the Stellar Improvement Award.


Australian Rover Challenge 2026, Adelaide
Key skills
- Technical leadership of a 30+ person multidisciplinary engineering team
- Stakeholder management across faculty, sponsors, and external partners including appearances at the International Astronautical Congress and SXSW
- Project management under significant financial constraints and a fixed competition deadline
- Systems-level engineering across mechanical, electrical, and software domains
- Strategic prioritisation of development effort based on competition point return
- Risk management and contingency planning across the full competition program
- Mentoring team members in DFM, DFA, and engineering best practice
← Back to projects